



ロボットコラム
 歩行アシストとアシモ
歩行アシストとアシモ
執筆者:伊藤吉泰(イトウヨシヤス)
カテゴリ : ロボット情報
「今回は歩行アシスト(ロボット)」についてのコラムです。
「自分の力で歩きたい」歩くことが困難な人への歩行訓練などのツール、それが歩行アシストです。
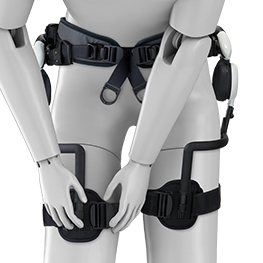
日本でも複数の会社より供給されていますが、今回は比較的コンパクトな構成のホンダ歩行アシストの紹介です。
(ホンダ歩行アシストは、2015年度より法人向けリース販売を開始し、各地のリハビリセンターなどで使用されていますが、新規販売は2020年度末で終了しています。)


ホンダ歩行アシストは、「倒立振子モデル」に基づく効率的な歩行をサポートする歩行練習機器です。(「倒立振子モデル」とは、支点が床に固定され、棒の先端に重りが付いて、支点を中心として重りが回転運動するモデル。)
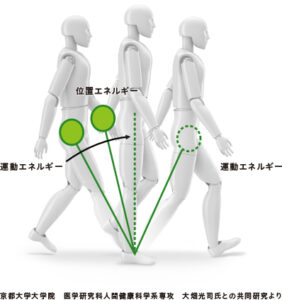
歩行時の股関節の動きを左右のモーターに内蔵された角度センサーで検知し、制御コンピューターでモーターを制御駆動しています。
股関節の屈曲による下肢の振り出しの誘導と、伸展による下肢の蹴り出しの誘導を行います。
アシストする強さやタイミングなども、専用のコントローラで左右それぞれ個別に設定することが可能です。

これらの技術は、ホンダの2足歩行ロボットアシモで培った歩行理論をもとに開発されたものです。
歩行アシスト開発当初はユニット全体で30kgを超える重量でしたが、その後各ユニットのコンパクト化をすすめ、リース販売開始時にはユニット部で3kg以内と軽量化されて実用化に結び付きました。
歩くことが困難な人へのサポート・アシスト技術は、SDGSの観点からも、より発展させてゆきたい技術です。ロボット技術の応用で、「より多くの人に移動する喜びを提供してゆくこと」が重要であると思います。
(歩行アシストを使った、リハビリ訓練の様子や利用者の声などはホンダホームページをご覧ください)
(コラム中の写真は、ホンダホームページから抜粋・掲載しています。)
執筆者プロフィール

- 本田技研工業OB (北米・中国 現地法人・生産拠点駐在含む)
-
2021年度より浜松ロボット産業創成研究会のコーディネータに就任。
本田技研工業では海外拠点での生産ラインの企画や立ち上げ業務、国内生産ラインのライン長などを歴任。得意領域は機械安全やロボット安全など労働安全分野、工場動力などでの省エネ/環境対応など。
最新の記事
 基礎知識2023年12月4日ゼロカーボン・トランスポート試乗記
基礎知識2023年12月4日ゼロカーボン・トランスポート試乗記 基礎知識2023年10月11日ノーベル賞とスペイン風邪
基礎知識2023年10月11日ノーベル賞とスペイン風邪 新技術2023年8月21日空のカーボンニュートラル
新技術2023年8月21日空のカーボンニュートラル 新技術2023年7月24日スーパーカミオカンデの紹介
新技術2023年7月24日スーパーカミオカンデの紹介